Curiosity sol 84 MAHLI self - portrait 9332 x 6728
Courtesy NASA/JPL /Caltech/MSSS" processing 2di7 & titanio44
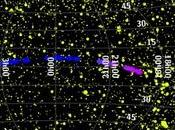
Avevamo lasciato Curiosity, circa un mese fa, in arrivo a Waypoint 2, ossia al secondo punto di interesse selezionato dal team di missione sulla strada per il monte Sharp.

Credit: NASA/JPL-Caltech/Univ. of Arizona
Giunto sul posto il rover ha focalizzato la sua attenzione in una zona chiamata Cooperstown, una sorta di scarpata che a me personalmente ricorda molto Yellowknife Bay, la zona dove Curiosity ha trascorso il Natale 2012 trovando un ambiente passato favorevole alla vita.

Curiosity sol 440 Navcam right - WayPoint 2 - Cooperstown
"Courtesy NASA/JPL-Caltech." processing 2di7 & titanio44
Durante il percoso il rover ha sperimentato diverse volte la modalità di navigazione Autonav con la quale, analizzando le immagini stereo delle sue fotocamere, sceglie autonomamente il percorso migliore.
Gli ultimi drive hanno portato il rover a circa 80 metri da Cooperstown, in un punto piuttosto panoramico, da dove Curiosity ha potuto guardarsi intorno per selezionare alcuni obiettivi scientifici.
"Quello che ci interessa di questo sito è un affioramento intrigante di materiale stratificato visibile nelle immagini orbitali", ha detto Kevin Lewis della Princeton University di Princeton, New York.
"Vogliamo vedere come l'affioramento stratificato di Cooperstown può aiutarci a relazionare la geologia di Yellowknife Bay alla geologia del Monte Sharp".

Curiosity sol 439 0439MR1789000000E1_DXXX 0439MR1789008000E1_DXXX
"Courtesy NASA/JPL-Caltech." processing 2di7 & titanio44

Curiosity sol 441 NavCam left right anaglyph
"Courtesy NASA/JPL-Caltech." processing 2di7 & titanio44
Nella formazione, il rover ha ispezionato un target con una caratteristica piuttosto curiosa: un piccolo cuneo rimasto incastrato nella roccia principale.

Curiosity MastCam left sol 441
"Courtesy NASA/JPL-Caltech." processing 2di7 & titanio44

Curiosity sol 442 MastCam right infrared
"Courtesy NASA/JPL-Caltech." processing 2di7 & titanio44
In reltà, quelli che vediamo sono due pezzi distinti, uno più tozzo sopra e uno a punta che sbuca più in basso.
Non sono esperta di geologia però mi sembra abbastanza plausibile che le due parti appartengano allo stesso elemento rimasto imprigionato nei processi di formazione che hanno coinvolto la roccia più grande.
Osservando la ripresa ravvicinata della ChemCam, sembrano in effetti avere caratteristiche superficiali distinte.
Quella che segue è una composizione a colori, ottenuta sfruttando le differenze di luminosità di tre diversi scatti.

Curiosity sol 443 ChemCam
"Courtesy NASA/JPL-Caltech." processing 2di7 & titanio44
Dal 4 novembre erano stati pianificati alcuni aggiornamenti software, la terza attività di questo tipo dal giorno dell'atterraggio in agosto 2012 ma, il 7 novembre, il rover ha subito un "warm reset", un riavvio che si manifesta in risposta ad un evento imprevisto nel software di bordo.
Il reset è avvenuto circa 4 ore e mezzo dopo che era stato caricato un nuovo software nella memoria del rover, quando Curiosity stava comunicando con il Mars Reconnaissance Orbiter (MRO), per trasmettere dati scientifici e telemetria.
Il team si è subito attivato per scoprire la causa del brusco arresto ma Curiosity sembrava comunque in salute pur essendo passato nello stato di safe-mode, dal quale è uscito domenica 10 novembre.
Il warm reset si è verificato per la prima volta da quando Curiosity è al lavoro su Marte ed ha riportato il software allo stato iniziale. Mentre questo è stato il secondo safe-mode: il primo, intenzionale, aveva seguito un problema alla memoria flash del computer principale manifestatosi il 28 febbraio scorso.
La causa sembra esser stata un errore software, che ha portato ad un problema di indicizzazione di un file nel momento in cui è stato processato dalla nuova versione.
Dopo aver simulato la situazione al JPL, domenica 10 novembre, la squadra ha inviato i comandi per correggere il problema, riportando Curiosity alla modalità normale.
Il rover non ha potuto eseguire attività scientifiche in quei giorni e il ritorno al lavoro era stato pianificato per il sol 452 (13 novembre 2013).
Mentre il team ha continuato a verificare i sistemi, ha eseguito solo una nuova guida dopo i giorni di fermo.
Quelli che seguono sono due mosaici del sol 453 (14 novembre 2013): il primo è un 360° della NavCam right in cui sono visibili anche le tracce lasciate dal rover; il secondo, un scorcio del paesaggio a sud ovest in cui abbiamo lavorato molto sull'orizzonte per una maggior definizione.

Curiosity sol 453 NavCam right 360° panorama
"Courtesy NASA/JPL-Caltech." processing 2di7 & titanio44

Curiosity sol 453 MastCam left
"Courtesy NASA/JPL-Caltech." processing 2di7 & titanio44
Ma gli inconvenienti per Curiosity non sembrano essere finiti: così la guida del sol 455 (16 novembre 2013) è stata interrotta a causa di una ruota andata in stallo e, contemporaneamente si è manifestato anche un problema elettrico.
Il rover è rimasto in una configurazione stabile ma naturalmente ogni attività successiva è stata dedicata alla ricerca di una soluzione.
Il problema elettrico sembra legato ad una leggera perdita attraverso qualcosa di parzialmente conduttivo, come ad esempio, due fili che toccano leggermente.
Durante il sol 456 (17 novembre), la squadra ha rilevato una differenza di tensione tra il telaio e l'alimentatore che distribuisce l'energia elettrica ai sistemi in tutto il rover.
L'impianto elettrico di Curiosity è stato progettato per rispondere con una buona flessibilità ed in effetti il rover aveva già sperimentato una situazione analoga il giorno dello sbarco. In quel caso, però, l'abbassamento di tensione era legato ai dispositivi di rilascio utilizzati poco prima dell'atterraggio.
L'analisi, finora, ha determinato che il cambiamento è apparso ad intermittenza tre volte prima che diventasse permanente e non vi è alcuna indicazione che questo problema sia legato al riavvio software dei primi di novembre.
Così, ora, Curiosity è ora piuttosto limitato perché il team preferisce indagare ulteriormente come giusta precauzione: sta eseguendo solo qualche guida e ogni operazione scientifica è arrestata.

Curiosity sol 455 MAHLI 0455MH0325005000E1_DXXX
"Courtesy NASA/JPL-Caltech." processing 2di7 & titanio44