Da quando, all'inizio del 2004, Spirit e Opportunity si sono posati sul pianeta rosso, ho seguito con entusiasmo (insieme a tanti altri appassionati sparsi per il mondo) i progressi quotidiani dei due rover gemelli con panorami che cambiavano quasi quotidianamente. Dopo che Spirit è rimasto insabbiato nella regione di Troy (presso Home Plate) ed ha smesso di funzionare nel Marzo 2010, è stato rimpiazzato nell' Agosto 2012 dal rover di nuova generazione Curiosit y, che avrebbe dovuto condurre esplorazioni ancora più approfondite e percorrere distanza maggiori ma, come vedremo, non tutto è andato come previsto in termini di capacità di spostamento.
Cominciamo analizzando le prestazioni delle varie generazioni di rover, tutti americani fino ad ora, che si sono succeduti su Marte. Per cominciare, ecco una tabella riassuntiva delle loro caratteristiche più salienti (i valori tra parentesi sono stime personali):
")
Atterrato nell'ormai lontano Luglio 1997, il piccolo rover è servito a sperimentare la possibilità di muoversi sul terreno usando una qualche autonomia di navigazione. Le piccole dimensioni delle ruote, unite alla necessità di comunicare continuamente con il Lander da cui era sceso, lo hanno necessariamente limitato e la distanza totale percorsa in quasi 3 mesi è stata di circa 100m, senza mai allontanarsi oltre una decina di metri dal punto di partenza. Anche il sistema di auto-navigazione era decisamente limitato e consentiva, al massimo, una percorrenza di 3 m/ora (meno di 1 mm/s, in media).
A sisnistra è possibile vedere una breve animazione (molto accelerata) di Soujourner che si allontana scavalcando alcune rocce nel Sol 24 - Credit: NASA - JPL - Mars Team Online
MER (Mers Exploration Rovers)
Tra 20 giorni, Opportunity festeggierà il suo undicesimo anno su Marte; in questo periodo, ha praticamente completato una maratona (percorrendo circa 41.5 km) ma, mentre un atleta umano impiega poco più di 2 ore per coprire questa distanza, il robot è stato infinitamente più lento e, calcolatrice alla mano, ha percorso in media solo 10,7 metri per ogni giorno marziano ( Sol); praticamente, la velocità di una lumaca! Ovviamente, il cammino è stato tutt'altro che regolare e Opportunity ha alternato periodi di roving su lunghe distanze, coprendo anche più di 100m/Sol (e raggiungendo 220m nel Marzo 2005, si veda il grafico storico l' articolo sulla odometria) a lunghe pause in cui ha esplorato il terreno circostante muovendosi pochissimo o addirittura rimanendo in letargo per non consumare energia durante i mesi invernali in cui la luce che alimenta i pannelli solari scarseggiava. Ragionando in termini percentuali, su una missione durata 3874 giorni marziani, quelli dedicati a percorrere una distanza apprezzabile (maggiore di 50 metri) sono stati solo il 4% mentre le percorrenze superiori ai 150m sono state 10 volte più rare, cioà una quindicina in tutto! Prima del lancio, si era dichiarato che i due rover avrebbero percorso una distanza tipica di 40m/Sol e, nei primi tre mesi (primary mission) avrebbero coperto circa 1 km; questi obiettivi "minimi" sono stati effettivamente raggiunti. In realtà, il sistema di navigazione dei MER dovrebbe permettere una velocità media di circa 1 cm/s ovvero un centinaio di metri/Sol, muovendosi durante le 3 ore più soleggiate del giorno; le percorrenze maggiori sono state invece raggiunte tramite " blind drives" in cui il sistema di navigazione è parzialmente disattivato e il rover procede "alla cieca" e senza pause. Questa modalità, che in teoria consentirebbe di aumentare di 3-5 volte la percorrenza su una superficie dura, è decisamente rischiosa ed infatti è stata utilizzata solo in poche occasioni in cui il terreno era particolarmente pianeggiante e privo di ostacoli. Nelle altre situazioni, è necessario attivare il software di navigazione; questo esamina la struttura tridimensionale del terreno davanti al rover grazie alla navigation camera stereoscopica ed elabora il cammino migliore; dopo uno spostamento di 0.5-2 metri, il rover si ferma e ripete l'analisi del terreno. Questo fino a quando il rover ha raggiunto la destinazione finale oppure quando viene fermato per altri meccanismi di "interrupt" (malfunzionamento, eccessivo slittamento, elevata pendenza del terreno oppure mancanza di energia solare).
Questi numeri ci forniscono una informazione importante, ovvero che in teoria i due MER avrebbero avuto la potenzialità di coprire da 4 a 10 volte la distanza effettivamente percorsa se le varie soste (forzate o volute) e l'attraversamento di zone piuttosto impervie non ne avesse rallentato drasticamente il cammino! A dire il vero, anche una percorrenza media di 40-100m al giorno è ben poca cosa se comparatta agli spostamenti cui tutti siamo abituati quotidianamente. Ovvio che il principale sopo dei rover marziani non sia quello di fare record di percorrenza e offrirci ogni giorno nuovi panorami, tuttavia distanze maggiori garantirebbero anche l'esplorazione di terreni molto diversi tra loro e quindi maggiori scoperte scientifiche; il problema è nel giusto compromesso tra tempo dedicato alle indagini scientifiche e quello dedicato al roving, al netto delle pause "tecniche" dovute a problemi hardware, di navigazione o ambientali (scarso irraggiamento solare, tempeste di sabbia e quant'altro).
Il rover di terza generazione avrebbe dovuto rappresentare un ulteriore balzo in avanti rispetto ai precedenti anche in termini di mobilità. Questo sia grazie alle ruote più grandi, sia e soprattutto grazie alla diversa sorgente di energia: un generatore a radioisotopi ( RTG), in grado di erogare abbondante energia di continuo, senza dovere più dipendere dall'irraggiamento solare con tutte le sue variazioni capricciose (legate, oltre che alla stagione, all'opacità dell'atmosfera, alla polvere depositata sui pannelli e all'inclinazione del rover). In base alle stime fatte prima del lancio, infatti, Curiosity avrebbe dovuto percorrere almeno 20 km in un anno marziano (23 mesi); per confronto, Spirit e Opportunity hanno coperto, rispettivamente, 5.5 e 6.5 km nel loro primo anno marziano. Questo significava che Curiosity sarebbe dovuto arrivare a scalare, almeno in parte, il Monte Sharp nel corso della missione primaria. Quello che in realtà è successo, come tutti sappiamo, è abbastanza diverso. Nel primo anno marziano, MSL ha percorso solo 8.2 km e questo principalmente a causa di una lunghissima sosta nel sito denominato Glenelg per effettuare approfondite indagini geologiche (si veda l' odometria globale a questo proposito). Anche dopo quella sosta durata circa 6 mesi, comunque, la velocità media è stata decisamente al di sotto delle aspettative: alla fine del 2014 (Sol 853), Curiosity ha percorso 10,12 km a una velocità media di 11,9 m/Sol (soltanto l'11% in più di Opportunity). In pratica, il rover è rimasto immobile per quasi il 70% dei giorni e ha effettuato percorrenze superiori ai 50m solo in 76 occasioni (il 9% dei giorni marziani), mentre la soglia dei 100m è stata superata solo 17 volte (2%), con un record di 144m nel Sol 385; il 50% degli spostamenti effettuati era comunque limitato a meno di 31m e il 20% addirittura sotto i 9m, tre volte la lunghezza del rover! Ultimamente, poi, Curiosity sta ripetendo l'esperienza di Glenelg poichè è rimasta confinata nella regione di circa 2000 m 2 (il 30% di un campo di calcio) denominata Pahrump Hills, dove sta compiendo analisi dallo scorso 18 Settembre; in questi 3 mesi e mezzo, il rover ha percorso poco più di 300 metri tornando spesso sui suoi passi.
")
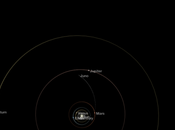
La traversata di Opportunity in oltre 2 anni, con ingrandimento sulla zona di Pahrump Hills - Image Credit: NASA/JPL-Caltech/Univ. of Arizona
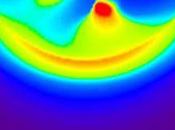
I motivi che stanno dietro questa scarsità di movimenti sono svariati: da un lato la necessità di effettuare analisi più approfondite di obiettivi gelologicamente interessanti (quali appunto Glenelg e Pahrump hills), dall'altro tratti di terreno più insidioso del previsto, che hanno costretto il team a terra a rallentamenti e cambi di direzione. Ma c'è, probabilmente, una motivazione recente e più grave; anche se non esplicitamente ammesso dalla NASA, lo stato di degrado delle ruote è decisamente eccessivo; all'inizio si trattava di ammaccature e piccole crepe o buchi, adesso ormai si osservano grossi squarci soprattutto nelle ruote medie e anteriori, come dimostrato dalle immagini seguenti:
")
Immagini della camera MAHLI che mettono a confronto le ruote sul lato destro del Rover a inizio missione (Sol 34 e a distanza di 2 anni) - Credit: NASA/JPL-Caltech
")
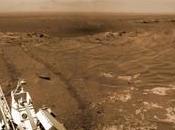
Immagini recenti (Sol 679 e 708) delle ruote sul lato sinistro del Rover; notare gli squarci sulla ruota media e anteriore (a destra) - Credit: NASA/JPL-Caltech
Le sei ruote hanno i raggi realizzati in titanio ma il "battistrada" è in alluminio e ha lo spessore paragonabile a quello di una lattina di bibita. In base alle prove fatte a terra, tenendo conto della gravità più bassa, avrebbero comunque dovuto reggere alle sollecitazioni ma erano evidentemente progettate per un terreno meno "aggressivo"; invece, dopo avere incontrato molti pavimenti rocciosi e pietre decisamente più dure e spigolose del previsto, la situazione è precipitata proprio verso la fine del primo anno marziano. Questo ha indotto il team di navigazione ad essere molto più cauto nella scelta del percorso ottimale e nella continua verifica dello stato delle ruote; idealmente, Curiosity dovrebbe proseguire su terreni sgombri di rocce e possibilmente ricoperti da uno strato di sabbia non troppo profondo ma sufficiente ad "ammortizzare" le asperità della roccia sottostante, cosa piuttosto difficile almeno esaminando le immagini del terreno riprese dalla sonda MRO. Inoltre, per sventare il rischio di una fine anticipata della missione (anche se la durata ufficiale era di due anni, si sperava di poterla estendere almeno fino a 5 anni), dovuta al possibile "sbrindellamento" delle ruote e al conseguente insabbiamento del veicolo, si è deciso di seguire una "roadmap" più breve verso le pendici del Monte Sharp e, contemporaneamente, fare delle soste prolungate e prendersela con calma per sollecitare al minimo le ruote e "capitalizzare" la mole di lavoro scientifico "in loco". E' anche possibile che, quando il rover comincerà ad avere probemi seri di aderenza sulle ruote anteriori, si decida di farlo procedere "in retromarcia" per sfruttare le ruote meno usurate; qualcosa di simile si fa già con Opportunity, anche se per motivi diversi (in quel caso è il motore elettrico di una delle ruote anteriori a dare problemi).
Nel prossimo articolo, vedremo alcune idee su come si potrebbero scavalare queste difficoltà nelle future missioni robotiche.
Riferimenti:
http://mars.nasa.gov/mer/technology/is_autonomous_mobility.html http://marsprogram.jpl.nasa.gov/MPF/mpf/fact_sheet.html http://nssdc.gsfc.nasa.gov/nmc/masterCatalog.do?sc=MESURPR http://en.wikipedia.org/wiki/Mars_Exploration_Rover http://mars.jpl.nasa.gov/msl/mission/rover/wheelslegs/